CAPITOLO 1:
SISTEMI EMBEDDED
Una definizione generale di sistema embedded può essere quella
che lo definisce come un "sistema di controllo basato su microprocessori
che elabora un insieme fissato di istruzioni programmate con lo scopo di
controllare le operazioni di apparecchiature elettromeccaniche e automatizzate".
Scendendo più nel dettaglio tale controllo consiste nel fornire
un interfaccia utente, gestire i dati di input e/o output e il comportamento
dellapparecchiatura cui tali sistemi sono associati [1-3].
Tra le mansioni in cui sono maggiormente usati ci sono compiti di controllo
di processi time-critical, perciò la loro presenza si nota soprattutto
nelle industrie che si occupano di controllo di processo, ma si possono
trovare sistemi embedded anche nellhardware per le comunicazioni, nei
terminali hardware di banche e finanziarie, in attrezzature mediche, nei
sistemi di gestione dei trasporti e negli elettrodomestici.
La differenza più significativa tra i sistemi industriali o commerciali
e i sistemi embedded (oltre a differenze nel design, in alcuni fattori
di forma e nei costi) è che questi ultimi sono installati allinterno
di un sistema automatizzato più grande e non possono essere visibili
allesterno.
Oltre alle differenze con i sistemi industriali bisogna mettere in evidenza
quelle che li caratterizzano rispetto ai sistemi desktop. Per cominciare
si usa parlare di microcontrollori nel dominio embedded e di microprocessori
nellarea desktop; tale diversità non è solo terminologica
perché, mentre i microcontrollori prevedono luso di RAM e ROM per
la gestione della memoria e sono associati a numerose periferiche, i microprocessori
prevedono luso di unità di gestione della memoria e di molte cache.
Dal momento che alcune piattaforme embedded sono nate come specializzazione
di architetture destinate allarea desktop le differenze tra queste due
aree tecnologiche non stanno nellorganizzazione dei registri, nellinsieme
delle istruzioni di base o nel concetto di pipeline, sono altri i fattori
discriminanti: consumo di potenza, costi e integrazione di periferiche.
A livello più hardware le caratteristiche peculiari dei sistemi
embedded riguardano il tempo di risposta agli interrupt, la qualità
di RAM e ROM su un singolo chip e il numero di porte parallele. Più
in generale, mentre larea desktop si preoccupa di valutare la potenza
nellesecuzione dei processi, il mondo embedded deve preoccuparsi di fare
il lavoro per una particolare applicazione al costo più basso possibile.
Altri fattori discriminanti sono le prestazioni, la prestazioni di un
sistema: devices a 8-16 bit fanno parte della classe dei microcontrollori.
Ultimamente si stanno affermando architetture basate sulluso di processori
embedded a 32 bit; il loro successo crescente deve imputarsi soprattutto
alla richiesta sempre maggiore di qualità e compattezza nelle dimensioni
dei dispositivi hardware che caratterizza i settori dei videogame, dei
computer palmari, della telefonia cellulare e della fotografia digitale:
esigenze che sono la forza che sta dietro al sempre crescente interesse
per il mondo dei processori embedded. Sono proprio le nuove applicazioni
sviluppate in questi campi a richiedere lo sviluppo di devices nuove e/o
più specializzate. Questa tendenza è talmente radicata che
alcuni di questi processori stanno cominciando a incorporare capacità
legate alle tradizionali CPU, introducendo parallelamente problematiche
legate ai costi di questa scelta, ai vincoli (sempre maggiori) imposti
dalle applicazioni e ai consumi. Da un punto di vista economico i costi
di sviluppo e il time-to-market impongono che queste nuove devices abbiano
un alto coefficiente di riuso da parte di altre applicazioni; così
facendo si riducono, anche, i problemi di apprendimento legati allo sviluppo
di un nuovo prodotto: sono queste le motivazioni principali che spiegano
la tendenza di molte società a disegnare e realizzare processori
embedded per un mercato molto specifico, da allargare successivamente.
Guardando al mercato che caratterizza queste tecnologie nella sua globalità
si può osservare che, mentre nel passato si poteva partizionare
in quattro settori di base nettamente separati, ora con lemergere di applicazioni
multimediali e per sistemi mobili (come telefoni cellulari e computer palmari)
non cè più una separazione netta, perché sono richieste
nuove tipologie di processori embedded per la cui realizzazione bisogna
attingere alle tecnologie messe a punto nellambito dei sistemi desktop.
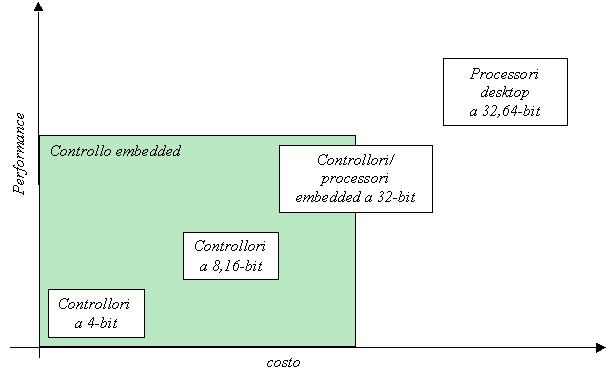
Figura 1: classi di processori e controllori embedded oggi.
Se da un lato si hanno esigenze specifiche legate al campo in cui tali
sistemi saranno introdotti, requisiti che riguardano un aumento del livello
di integrazione dei componenti e/o della loro prestazioni sono comuni a
qualsiasi dominio applicativo.
Tra i parametri più usati quando si devono confrontare processori
embedded ci sono:
-
consumo di potenza;
-
prestazioni;
-
densità del codice;
-
aspetti multimediali;
-
periferiche e integrazione.
Passiamo a considerarli in dettaglio:
I processori embedded
hanno tre modi di funzionamento:
-
in funzionamento: il segnale di clock è propagato allintero
processore e tutte le unità funzionali possono eseguire delle istruzioni;
-
in stand-by: il processore non sta eseguendo unistruzione, ma sono
disponibili tutte le informazioni memorizzate; se arriva un interrupt esterno
il processore torna in funzionamento senza perdere informazioni;
-
in clock-off: il sistema non è in funzionamento e deve essere
riavviato per tornare in questo stato (il riavvio è unoperazione
particolarmente lunga).
Gli sforzi di riduzione dei consumi si indirizzano ai primi due modi
di funzionamento. Tale scopo viene raggiunto arrestando lattività
dei transistors quando i blocchi che gestiscono non viene usato; questo
spiega perché ogni registro, flip-flop o latch, è collegato
direttamente al clock-tree del processore e, di conseguenza, perché
limplementazione del clock è un fattore cruciale.
La maggiore integrazione delle periferiche sta facendo crescere linteresse
per le problematiche che riguardano i consumi anche a livello questi dispositivi,
portando alla valutazione di un parametro come il consumo di potenza non
più a livello di processore (e quindi di "core" della macchina),
ma al livello dellintero sistema.
-
prestazioni
Un parametro come il consumo di potenza non deve essere considerato lunico
punto di riferimento nella valutazione di un processore embedded, deve
essere messo in relazione con le sue prestazioni. Lunità di misura
finora usata per il confronto delle prestazioni tra processori embedded
è il rapporto MIPs/watt, tuttavia questa risulta uno strumento di
valutazione insufficiente: anche le istruzioni NOP, durante le quali il
processore non lavora attivamente, possono teoricamente entrare in una
valutazione che usa il rapporto MIPS/watt come parametro. Per ovviare a
questi problemi i programmi di valutazione sono stati sviluppati in modo
da non considerare soltanto il numero di istruzioni eseguite.
Un altro fattore limitante delle prestazioni nel mondo embedded è
il throughput dei dati o larghezza di banda (bandwidth). In questi sistemi
sta diventando sempre più pesante processare i dati (per via di
operazioni come la codifica di immagini) al punto da rendere necessario
un interesse maggiore nel design delle cache e nellarchitettura del bus
dei dati. Queste problematiche sono già state incontrate nel processo
di sviluppo dei sistemi desktop, ma in questo caso bisogna tener conto
di aspetti cruciali e fondamentali come mantenere bassi i costi e potenziare
le capacità real-time.
Le architetture CISC hanno una buona densità del codice per
via delle loro istruzioni più complesse. La filosofia adottata nel
design delle architetture RISC, invece, prevede come requisito di base
delle istruzioni di lunghezza prefissata in modo da semplificare e accelerare
la fase di decodifica delle istruzioni stesse. Questo significa che ad
unistruzione CISC può corrispondere una o più istruzione
RISC. Lintroduzione di queste architetture è, inoltre, legata al
concetto di pipeline: le architetture che hanno scelto di adottarle forzano
il processore ad avere un processo di codifica delle istruzioni più
unificato; ad esempio in questa direzione deve collocarsi la scelta di
adottare istruzioni di 32-bit, anche se ebbe effetti negativi sulla densità
del codice tanto da indirizzare molti verso lo studio e lintroduzione
di nuove strategie.
Una soluzione in questo senso fu quella di usare istruzioni di 16-bit;
in questo modo si è circoscritto il problema legato al codice dei
programmi (ad eccezione delle operazioni di gestione degli indirizzi e
dei valori diretti), ma è aumentata la larghezza di banda per le
istruzioni caricate in memoria.
Un approccio differente prevede, invece, luso di istruzioni a lunghezza
variabile di 16, 32, 48-bit; in questo modo i valori diretti non sono implementati
facendo riferimento alle tabelle, ma sono codificati direttamente in istruzioni
di 48-bit. Così migliora il processo di decodifica nelle architetture
CISC, ma resta sempre più complicato rispetto agli approcci a lunghezza
fissa perché lo stato della macchina deve decidere rapidamente quale
istruzione decodificare e quali dati trasferire al prossimo stadio.
Un fattore che influenza significativamente la densità del codice
è la qualità dei compilatori C: nel mondo embedded ANSI C
è lo standard de facto. Tuttavia più aumentano le prestazioni
dei processori embedded, più i linguaggi object-oriented giocheranno
un ruolo importante.
Future riduzioni nella densità del codice porteranno sicuri
guadagni in prestazioni.
Nel mondo embedded si sta assistendo ad una fusione tra le CPU convenzionali
e le capacità dei DSP come è avvenuta nel campo dei sistemi
desktop; in relazione a questi temi, le discussioni sono sempre più
dominate dai cosiddetti "media MIPS". Per implementare queste capacità
si sta allargando linsieme delle istruzioni dei microcontrollori convenzionali
con altre che accelerino lesecuzione del codice multimediale: da qui linteresse
allinsieme delle istruzioni che caratterizza un processore DSP. Queste
istruzioni multimediali aggiuntive servono a supportare operazioni di accumulazione
multipla per velocizzare il filtraggio, un modo di indirizzamento potenziato,
laccelerazione grafica e istruzioni che si occupano della trasformata
discreta di Fourier per la compressione di immagini in formato MPEG o JPEG.
Da un punto di vista più tecnico applicazioni embedded che devono
gestire, ad esempio un telefono cellulare, necessitano un buon numero di
funzionalità per maneggiare lo stack del protocollo linterfaccia
col mondo esterno, ma in questo modo aumenta il bisogno di equalizzazione,
codifica/decodifica della voce e compressione.
Tradizionalmente questi aspetti erano gestiti con un microcontrollore
a basse prestazioni e un processore DSP dedicato, come mostrato in figura
2.
Gestire tutto con un solo microprocessore semplifica drasticamente
la struttura di tutto il sistema in quanto si ha soltanto un flusso di
istruzioni, come si può notare in figura 3.
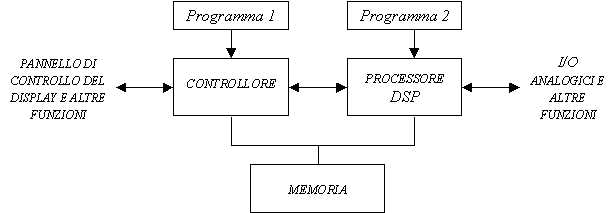
Figura 2: architettura tradizionale di un sistema che richiede
controllo e funzionalità DSP, si possono notare i due flussi che
seguono le istruzioni di un programma (Programmi 1 e Programma 2).
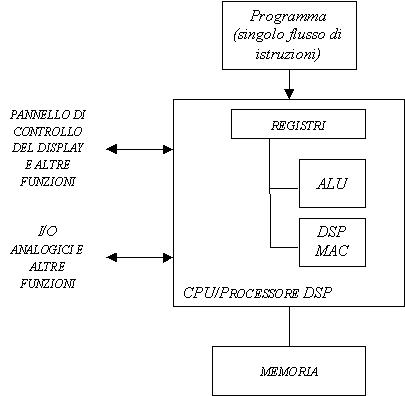
Figura 3: architettura dei sistemi che adottano lapproccio ad
un solo processore embedded che contiene anche funzionalità DSP.
-
periferiche e integrazione
Nel campo dei sistemi embedded le scelte fatte nella realizzazione
di un processore devono tener conto di quali periferiche integrare nel
sistema. A questo punto si hanno diverse possibilità di scelta:
ad esempio si potrebbe integrare tutto sulla stessa matrice, ma questa
non è sempre la soluzione più economica perché aumenta
la complessità del chip così realizzato e diminuisce, dallaltro
lato, la sua resa, senza contare la necessità di una fase di testing
più ampia. Ci sono due strategie di integrazione delle periferiche
che non si differenziano su un piano tecnico, ma vengono adottate a seconda
dellambito in cui è inserito il sistema:
-
si può fornire un "core" di base e integrare logica addizionale
per una device "personalizzata";
-
si può offrire un processore standard insieme con un altro chip
che soddisfi le esigenze specifiche dell'applicazione; si può aumentare
la flessibilità fornendo una famiglia di tali chip o cambiando il
processore principale. Luso di architetture che adottano chip aggiuntivi
favorisce future standardizzazioni nel mercato embedded.
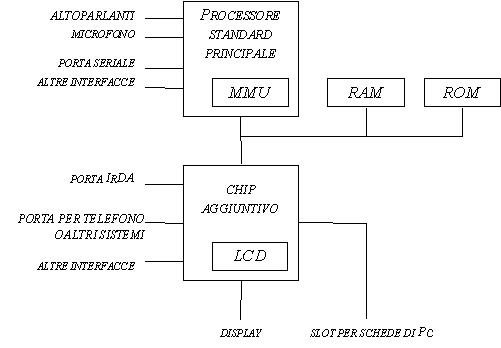 Figura 4: esempio di devices con un approccio a due chip.
Figura 4: esempio di devices con un approccio a due chip.
La tendenza nel mercato embedded è lo sviluppo di nuove classi
di processori e controllori a 32-bit: si parte da controllori low-end a
10 MHz per arrivare a processori embedded che fanno parte dellarea a 300
MIPS.
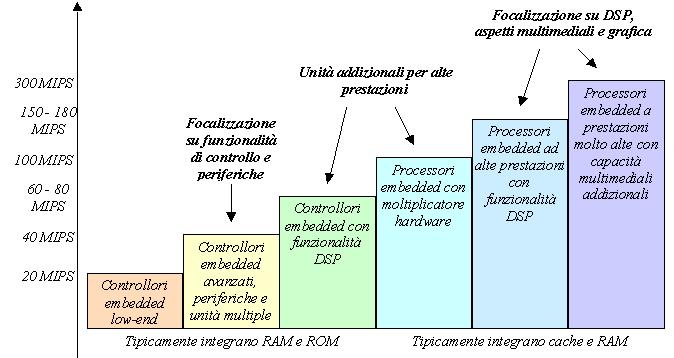
Figura 5: visione del mercato dei processore e controllori embedded
a 32-bit.
Alla domanda se ci sarà mai unarchitettura dominante come nel
dominio dei sistemi desktop, oggi bisogna rispondere negativamente perché
il mondo embedded è guidato da una grande varietà di applicazioni;
tuttavia la tendenza ad usare sistemi operativi e piattaforme standard
cè ed è dovuta alla necessità di ridurre i costi
di sviluppo, aumentare la riusabilità e migliorare il tempo di ciclo
di design. Una possibilità realistica è che ogni segmento
di mercato abbia unarchitettura dominante.